Συγγραφέας:
Laura McKinney
Ημερομηνία Δημιουργίας:
10 Απρίλιος 2021
Ημερομηνία Ενημέρωσης:
15 Ενδέχεται 2024

Περιεχόμενο
- στάδια
- Μέρος 1 Συναρμολόγηση του ρομπότ
- Μέρος 2 Πραγματοποίηση των συνδέσεων
- Μέρος 3 Συνδέστε το τροφοδοτικό
- Μέρος 4 Εγκαταστήστε το πρόγραμμα Arduino
- Μέρος 5 Προγραμματισμός του ρομπότ
Θέλετε να μάθετε πώς να δημιουργείτε το δικό σας ρομπότ; Υπάρχουν πολλοί διαφορετικοί τύποι ρομπότ που μπορείτε να κάνετε μόνοι σας. Οι περισσότεροι άνθρωποι θέλουν τα δικά τους να εκτελούν απλές εργασίες, όπως το να πηγαίνουν από το σημείο Α στο σημείο Β. Μπορείτε να φτιάξετε ένα με παρόμοια εξαρτήματα ή μπορείτε να ξεκινήσετε από το μηδέν. Είναι μια σπουδαία δραστηριότητα για να μάθετε τα βασικά της ηλεκτρονικής και του προγραμματισμού.
στάδια
Μέρος 1 Συναρμολόγηση του ρομπότ
-

Πάρτε το υλικό. Για να δημιουργήσετε ένα βασικό ρομπότ, χρειάζεστε αρκετά απλά στοιχεία. Θα βρείτε τα περισσότερα από αυτά τα στοιχεία σε ένα ηλεκτρονικό κατάστημα και σε πολλούς δικτυακούς τόπους πωλήσεων στο διαδίκτυο. Ορισμένα βασικά κιτ πρέπει επίσης να τα προσφέρουν. Το ρομπότ που πρόκειται να κατασκευάσετε δεν απαιτεί συγκόλληση. Εδώ είναι αυτό που χρειάζεστε:- 1 Arduino Uno (ή άλλος τύπος μικροελεγκτή)
- 2 συνεχώς περιστρεφόμενους σερβοκινητήρες
- 2 τροχοί προσαρμοσμένοι σε σερβομηχανισμούς
- 1 ελεύθερο τροχό
- 1 μικρό πινάκιο με θετική και αρνητική γραμμή σε κάθε πλευρά
- 1 ανιχνευτής απόστασης (με συνδετήρα τεσσάρων ακίδων)
- 1 μικρό διακόπτη με αντίσταση 10 kΩ
- εύθραυστες συνδέσεις
- 1 θήκη για 6 μπαταρίες AA με βύσμα 9 DC
- καλώδια σύνδεσης
- ισχυρή ταινία διπλής όψης ή θερμή κόλλα
-
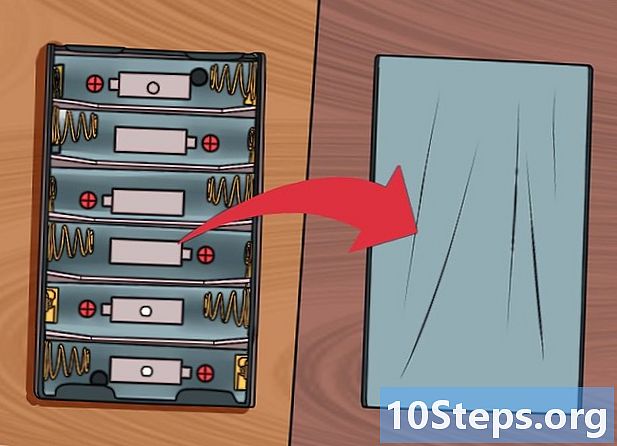
Ανασηκώστε την θήκη της μπαταρίας για να εκθέσετε την πίσω πλευρά. Θα χρησιμοποιήσετε την υπόθεση ως βάση για την κατασκευή του ρομπότ. -
Ευθυγραμμίστε τους δύο σερβομηχανισμούς. Ευθυγραμμίστε τους δύο σερβοκινητήρες στο τέλος του περιβλήματος. Αυτό πρέπει να είναι το τέλος των καλωδίων ισχύος. Οι σερβοί πρέπει να αγγίζουν το κάτω μέρος και οι περιστρεφόμενοι μηχανισμοί του καθενός θα πρέπει να στραφούν προς το εξωτερικό της θήκης. Είναι σημαντικό να ευθυγραμμιστούν σωστά οι σερβομηχανισμοί έτσι ώστε οι τροχοί να είναι ίσιοι. Τα καλώδια σερβο πρέπει να προεξέχουν στο εσωτερικό της θήκης. -

Ασφαλίστε το σερβο. Κρατήστε το σερβο στη θέση του με ταινία ή κόλλα. Πρέπει να ελέγξετε ότι είναι ασφαλώς τοποθετημένα στην θήκη. Το πίσω μέρος των κινητήρων πρέπει να είναι τέλεια ευθυγραμμισμένο με το πίσω μέρος του περιβλήματος.- Πρέπει τώρα να καταλαμβάνουν το ήμισυ του πίσω μέρους της θήκης της μπαταρίας.
-
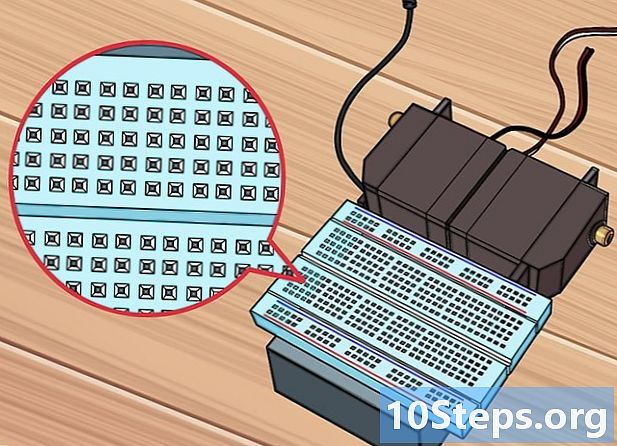
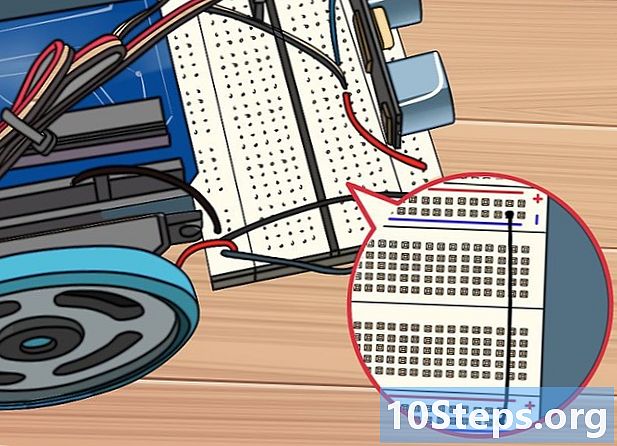
Συνδέστε την πινακίδα δοκιμής. Κόψτε την πλάκα ελέγχου κάθετα στο περίβλημα. Θα πρέπει να επεκταθεί λίγο πέρα από το μπροστινό μέρος της θήκης και στις δύο πλευρές. Βεβαιωθείτε ότι το ασφαλίζετε πριν συνεχίσετε. Η γραμμή Α πρέπει να είναι πιο κοντά στους σερβο. -

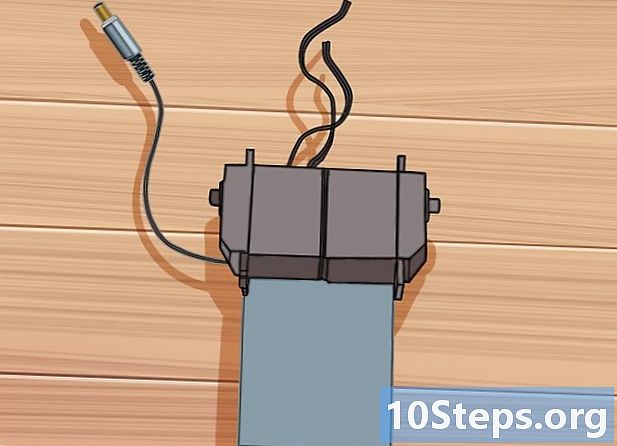
Συνδέστε το Arduino. Συνδέστε τον μικροελεγκτή Arduino στην κορυφή των κινητήρων. Εάν τα έχετε καθορίσει, θα πρέπει να υπάρχει ένας επίπεδος χώρος στην κορυφή όπου αγγίζουν. Συνδέστε την πλάκα Arduino επάνω της έτσι ώστε η θύρα USB και το βύσμα τροφοδοσίας να βλέπουν προς τα πίσω, προς την αντίθετη κατεύθυνση προς την πλάκα ελέγχου. Το πλυντήριο Arduino πρέπει να προεξέχει ελαφρώς μόνο στην πλάκα ελέγχου. -

Τοποθετήστε τους τροχούς. Πιέστε σταθερά τους τροχούς για να τους συνδέσετε στο μηχανισμό περιστροφής του κινητήρα. Αυτό μπορεί να απαιτεί κάποια δύναμη, καθώς οι τροχοί έχουν σχεδιαστεί ώστε να είναι όσο το δυνατόν πιο σφιχτοί στον άξονα για να παρέχουν την καλύτερη δυνατή πρόσφυση. -

Συνδέστε τον ελεύθερο τροχό στο κάτω μέρος της πλάκας. Εάν γυρίσετε το πλαίσιο, θα πρέπει να δείτε ότι το τμήμα της πινακίδας δοκιμής προεξέχει από την θήκη της μπαταρίας. Συνδέστε τον ελεύθερο τροχό πάνω του με τη χρήση ελαστικών, αν είναι απαραίτητο, για να ρυθμίσετε το ύψος του τροχού. Αυτός ο ελεύθερος τροχός θα είναι ο μπροστινός τροχός και θα επιτρέψει στο ρομπότ να γυρίσει προς οποιαδήποτε κατεύθυνση.- Εάν αγοράσατε ένα κιτ, η ελεύθερη τροχαλία μπορεί να έχει παραδοθεί με βίδες που μπορείτε να χρησιμοποιήσετε για να βεβαιωθείτε ότι αγγίζει το έδαφος.
Μέρος 2 Πραγματοποίηση των συνδέσεων
-

Αποσυνδέστε δύο υποδοχές τριών ακίδων. Θα το χρησιμοποιήσετε για να συνδέσετε τους σερβοκινητήρες στην πινακίδα ελέγχου. Πιέστε τις κάρτες από το πλαστικό μέρος έτσι ώστε να έχουν το ίδιο μέγεθος και στις δύο πλευρές. -

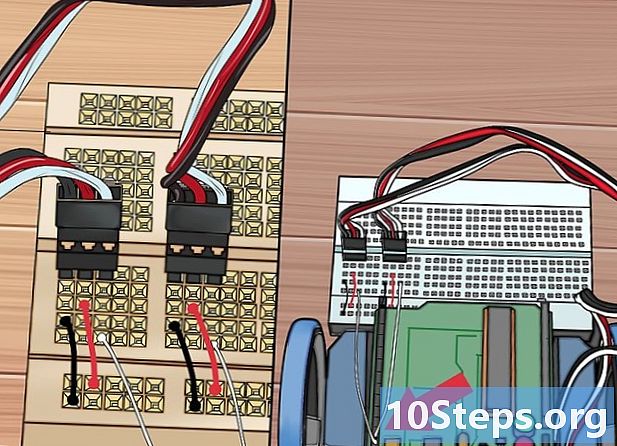
Τοποθετήστε τους δύο συνδέσμους. Τοποθετήστε τους δύο συνδέσμους στις εγκοπές 1-3 και 6-8 της σειράς Ε στην πλάκα. Βεβαιωθείτε ότι τα έχετε καλά. -

Συνδέστε τα σερβο-καλώδια στις υποδοχές. Όταν το κάνετε, συνδέστε το μαύρο καλώδιο στην αριστερή πλευρά (βύσματα 1 και 6). Αυτό επιτρέπει την σύνδεση των σερβομηχανισμών με την πινακίδα ελέγχου. Βεβαιωθείτε ότι το αριστερό σέρβο είναι συνδεδεμένο με τον αριστερό συνδετήρα και ότι ο σωστός σερβοί είναι στον δεξιό σύνδεσμο. -

Συνδέστε τα κόκκινα καλώδια. Συνδέστε τα κόκκινα καλώδια των βύσματος C2 και C7 στην κόκκινη (θετική) γραμμή της πινακίδας δοκιμής. Βεβαιωθείτε ότι χρησιμοποιείτε την κόκκινη σειρά στο πίσω μέρος της πλάκας (αυτή που βρίσκεται πιο κοντά στο υπόλοιπο πλαίσιο). -

Συνδέστε τα μαύρα καλώδια. Συνδέστε τα μαύρα σύρματα των βυσμάτων B1 και B6 στη μπλε (αρνητική) γραμμή της πινακίδας ελέγχου. Βεβαιωθείτε ότι χρησιμοποιείτε τη μπλε σειρά στο πίσω μέρος της πλάκας. Μην τα συνδέετε στη σειρά με κόκκινο χρώμα. -
Συνδέστε τα λευκά καλώδια. Συνδέστε τα λευκά καλώδια σύνδεσης από τα 12 και 13 βύσματα στις βύσματα Arduino A3 και A8. Αυτό θα επιτρέψει στον μικροελεγκτή να ελέγξει τους σερβομηχανισμούς και να περιστρέψει τους τροχούς. -

Συνδέστε τον ανιχνευτή στο μπροστινό μέρος της πλάκας. Δεν πρέπει να το εγκαταστήσετε στη σειρά που είναι συνδεδεμένη με το ρεύμα της δοκιμαστικής πλακέτας, αλλά στην πρώτη σειρά των βυσμάτων με το γράμμα J. Βεβαιωθείτε ότι το τοποθετείτε στο κέντρο, με ίσο αριθμό βυσμάτων σε κάθε πλευρά. -

Συνδέστε το μαύρο καλώδιο σύνδεσης. Συνδέστε το μαύρο καλώδιο σύνδεσης από το βύσμα I14 στο πρώτο βύσμα που υπάρχει στη μπλε σειρά στα αριστερά του ανιχνευτή. Αυτός συνδέεται με το έδαφος. -

Συνδέστε το κόκκινο καλώδιο σύνδεσης. Συνδέστε το κόκκινο καλώδιο σύνδεσης από το βύσμα I17 στο πρώτο βύσμα που υπάρχει στην κόκκινη σειρά στη δεξιά πλευρά του ανιχνευτή. Αυτός θα τροφοδοτήσει τον ανιχνευτή. -

Συνδέστε το λευκό καλώδιο σύνδεσης. Συνδέστε ένα λευκό καλώδιο σύνδεσης από το βύσμα I15 στο βύσμα Arduino 9 και ένα άλλο λευκό καλώδιο από το βύσμα I16 στο βύσμα 8. Αυτό θα επιτρέψει τη διαβίβαση των πληροφοριών στον μικροελεγκτή.
Μέρος 3 Συνδέστε το τροφοδοτικό
-

Αναποδογυρίστε το ρομπότ για να δείτε την πλευρά με τις μπαταρίες. Προσανατολίστε το ώστε τα καλώδια της θήκης να εμφανίζονται από το κάτω αριστερό μέρος. -

Συνδέστε το κόκκινο καλώδιο. Συνδέστε το κόκκινο καλώδιο στο δεύτερο ελατήριο στα αριστερά στο κάτω μέρος. Πρέπει να είστε απολύτως βέβαιοι ότι η θήκη είναι προσανατολισμένη σωστά. -

Συνδέστε το μαύρο καλώδιο. Συνδέστε το μαύρο καλώδιο στην τελευταία άνοιξη που βρίσκεται κάτω δεξιά. Αυτά τα δύο καλώδια θα σας βοηθήσουν να αποκτήσετε την κατάλληλη τάση στο Arduino. -

Συνδέστε τα κόκκινα και μαύρα σύρματα. Συνδέστε το κόκκινο και το μαύρο καλώδιο στις ακίδες που βρίσκονται στην άκρα δεξιά στο πίσω μέρος της πινακίδας ελέγχου. Το μαύρο καλώδιο πρέπει να συνδεθεί με τη μπλε γραμμή στο βύσμα 30. Το κόκκινο καλώδιο πρέπει να συνδεθεί στην κόκκινη γραμμή στο βύσμα 30. -

Συνδέστε ένα μαύρο καλώδιο στο έδαφος. Τοποθετήστε ένα μαύρο καλώδιο μεταξύ του βύσματος γείωσης του Arduino (GND) και της μπλε σειράς στο πίσω μέρος. Συνδέστε το στο βύσμα 28 στην πλάκα. -
Τοποθετήστε ένα άλλο μαύρο καλώδιο. Συνδέστε ένα μαύρο καλώδιο στην μπλε σειρά στο πίσω μέρος στον ακροδέκτη 29 στη μπλε σειρά του μπροστινού μέρους. Μην συνδέετε τις κόκκινες σειρές, καθώς αυτό μπορεί να προκαλέσει βλάβη στον μικροελεγκτή. -

Τοποθετήστε ένα κόκκινο καλώδιο. Συνδέστε ένα κόκκινο σύρμα μεταξύ της κόκκινης σειράς των 30 και των 5V στο Arduino. Αυτό θα ενεργοποιήσει τον μικροελεγκτή. -
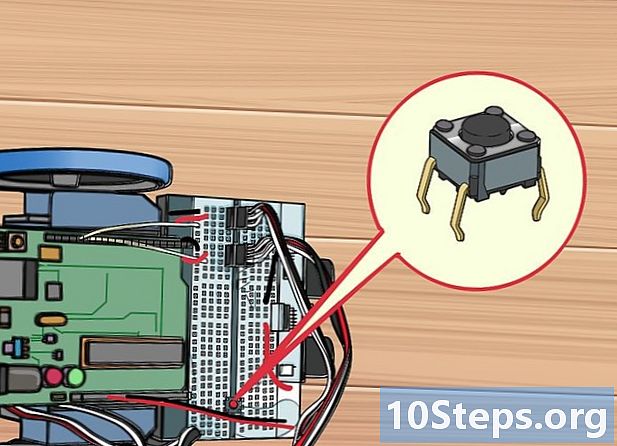
Τοποθετήστε το κουμπί. Τοποθετήστε το κουμπί στο διάστημα μεταξύ των γραμμών στις ακίδες 24-26. Ο διακόπτης θα σας επιτρέψει να ενεργοποιήσετε και να απενεργοποιήσετε το ρομπότ χωρίς να χρειάζεται να απενεργοποιήσετε την τροφοδοσία. -

Συνδέστε ένα νέο κόκκινο καλώδιο. Συνδέστε ένα κόκκινο καλώδιο μεταξύ του βύσματος H24 και της κόκκινης σειράς στο επόμενο βύσμα που βρίσκεται στα δεξιά του ανιχνευτή. Αυτό θα τροφοδοτήσει το κουμπί. -

Χρησιμοποιήστε έναν αντιστάτη για να συνδέσετε το H26 με τη μπλε σειρά. Συνδέστε το απευθείας στο βύσμα δίπλα στο μαύρο καλώδιο που συνδέσατε παραπάνω. -
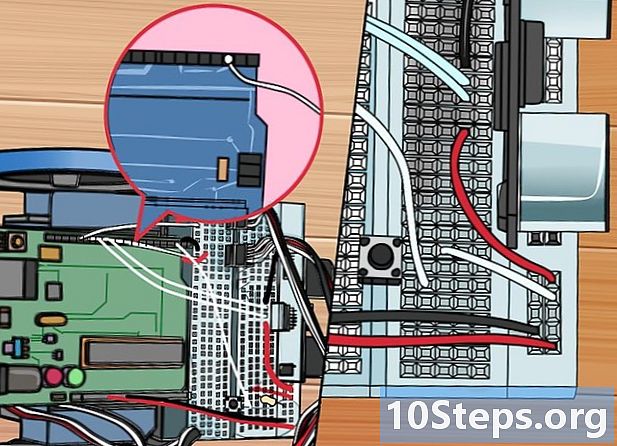
Συνδέστε ένα λευκό καλώδιο μεταξύ του G26 και του βύσματος Arduino 2. Αυτό θα επιτρέψει στο Arduino να ανιχνεύσει την κατάσταση του κουμπιού.
Μέρος 4 Εγκαταστήστε το πρόγραμμα Arduino
-

Κάντε λήψη και εγκατάσταση του IDE. Το LIDE είναι το αναπτυξιακό περιβάλλον Arduino και σας επιτρέπει να προγραμματίσετε τις οδηγίες πριν τις στείλετε στο πιάτο. Μπορείτε να το κατεβάσετε δωρεάν στο arduino.cc/en/main/software. Αποσυμπιέστε το λαχανικό κάνοντας διπλό κλικ πάνω του και μετακινήστε το φάκελο σε μια γωνία που θα θυμάστε εύκολα. Δεν θα εγκαταστήσετε το πρόγραμμα, απλά θα το ξεκινήσετε από το φάκελο που εξάγεται κάνοντας κλικ στο arduino.exe. -

Συνδέστε το κιβώτιο της μπαταρίας στο Arduino. Συνδέστε το βύσμα στην υποδοχή του πίνακα Arduino για να το τροφοδοτήσετε. -
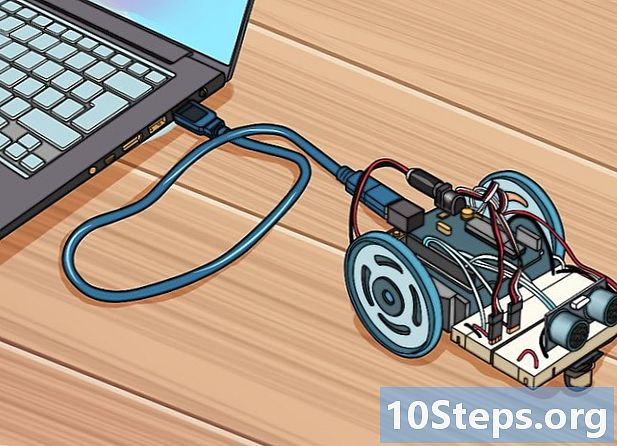
Συνδέστε το Arduino στον υπολογιστή σας. Χρησιμοποιώντας ένα καλώδιο USB, συνδέστε την πλάκα στον υπολογιστή σας. Τα Windows πιθανότατα δεν θα το αναγνωρίσουν. -

Πατήστε ⊞ Κερδίστε+Ε και πληκτρολογήστε devmgmt.msc. Αυτό θα ξεκινήσει το πρόγραμμα διαχείρισης. -

Συνεχίστε την εγκατάσταση. Κάντε δεξί κλικ στο Άγνωστη συσκευή στο τμήμα Άλλες συσκευές και επιλέξτε Msgstr "Ενημέρωση του προγράμματος οδήγησηςΑν δεν βλέπετε αυτήν την επιλογή, κάντε κλικ στην επιλογή ιδιότητες, κάντε κλικ στην καρτέλα πιλότος, στη συνέχεια επιλέξτε Ενημερώστε το πρόγραμμα οδήγησης. -

Επιλέξτε "Επιλέγοντας ένα πρόγραμμα οδήγησης στον υπολογιστή'. Αυτό σας επιτρέπει να επιλέξετε το πρόγραμμα οδήγησης που παρέχεται με το IDE του Arduino. -

Κάντε κλικ στο πλοήγηση και αναζητήστε το φάκελο. Θα βρείτε τα προγράμματα οδήγησης που χρειάζεστε στο φάκελο που εξάγετε νωρίτερα. -

Επιλέξτε τα προγράμματα οδήγησης και κάντε κλικ «OK'. Αν έχετε προειδοποίηση λόγω του άγνωστου προγράμματος, επιβεβαιώστε ότι θέλετε να συνεχίσετε.
Μέρος 5 Προγραμματισμός του ρομπότ
-

Εκκινήστε το IDE. Ξεκινήστε το IDE του Arduino κάνοντας διπλό κλικ στο αρχείο arduino.exe στο φάκελο του IDE. Αυτό θα ανοίξει μια κενή σελίδα για ένα νέο έργο. -

Επικολλήστε τον κώδικα για να προωθήσετε το ρομπότ ευθεία. Ο παραπάνω κώδικας θα μετακινήσει συνεχώς το ρομπότ προς τα εμπρός.#include
// αυτό προσθέτει τη βιβλιοθήκη "servo" στο πρόγραμμα // αυτό δημιουργεί δύο αντικείμενα και για τους δύο Servo leftMotor servos. Servo rightMotor; άκυρη ρύθμιση ()


